
Корзина пуста
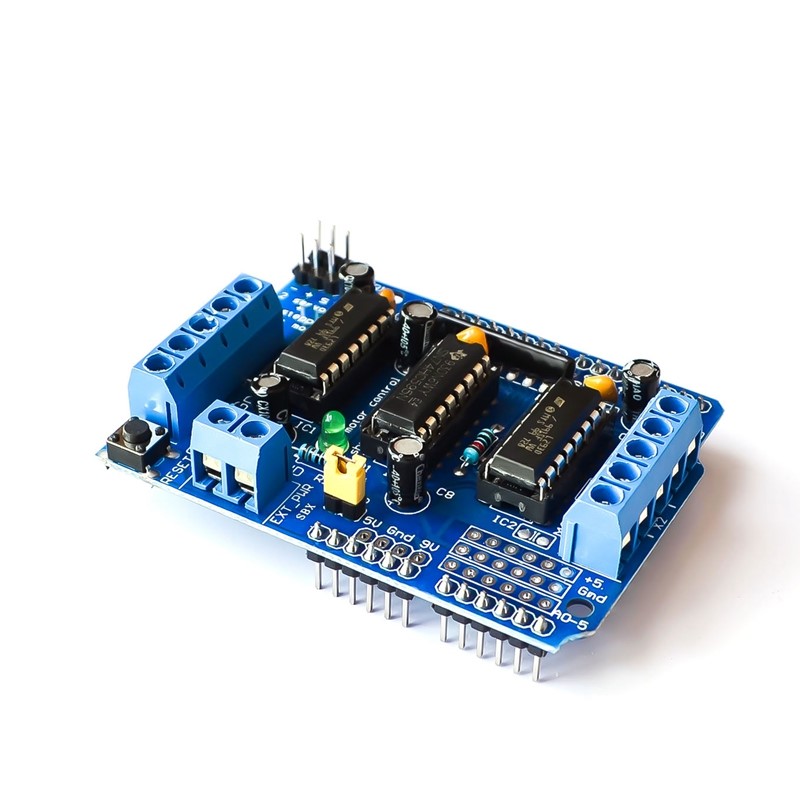
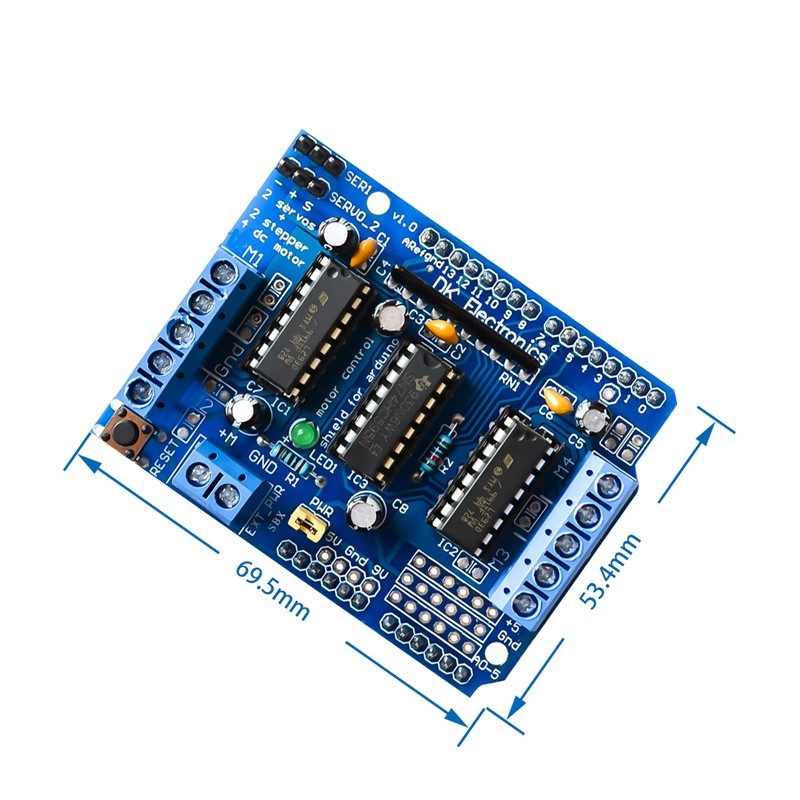
В составе этой платы имеются две микросхемы L293D , они позволяют управлять слаботочными двигателями с током потребления до 600 мА на канал. Для подключения двигателей используются зажимные клеммы (2).
Использование двух микросхем L293D позволяет одновременно подключить 4 моторчика постоянного тока либо 2 шаговых мотора, либо два моторчика и шаговый. Для управления на прямую выводами L293D (IN1, IN2, IN3, IN4),отвечающими за выбор направления вращения, необходимо 4 вывода, а для двух микросхем целых 8.
Для уменьшения количества управляющих выводов в игру вступает сдвиговый регистр 74НС595 . Благодаря регистру управление сводится с 8-ми пинов к 4-ем.
Так же на шильде имеются шесть пинов для подключения двух сервоприводов. (Кстати очень полезная и нужная штука, если понадобиться прицепить манипулятор с двумя степенями свободы).
Питание силовой части производится либо от внешнего клемника либо замыканием джампера ( питание от клеммника моторов +M соединяется с выводом VinArduino).
При замкнутом джампере напряжение для объединенного питания должно лежать в пределах от 6 до 12 Вольт.
Используемые выводы Arduino для управления моторами
Выводы для скорости вращения двигателями:
- D11: DC Мотор №1 / Шаговый №1
- D3: DC Мотор №2 / Шаговый №1
- D5: DC Мотор №3 / Шаговый №2
- D6: DC Мотор №4 / Шаговый №2
Выводы, отвечающие за направления двигателей:
- D4, D7, D8, D12
Выводы для управления сервоприводами:
- D9: Сервопривод №1
- D10: Сервопривод №2
Незадействованные аналоговые входы(Они же могут быть и дискретными вводами/выводами):
- А0-А6 (либо в коде указываем дискретные 14-19)